











OEM робот манипулятор системы
На рынке автоматизации сейчас много шумихи вокруг автоматизации производственных процессов, и системы роботов-манипуляторов, безусловно, в центре внимания. Часто вижу, как заказчики ищут решение 'под ключ', предполагая, что это просто вопрос интеграции готового робота. Но на практике всё гораздо сложнее. Попытаюсь поделиться некоторыми мыслями и опытом, а точнее, с некоторыми провалами и успехами, которые нам приходилось переживать.
Неочевидные сложности при реализации ОЕМ решений
Вопрос ОЕМ робот манипулятор системы – это не просто закупка оборудования. Это комплексный процесс, включающий в себя проектирование, разработку программного обеспечения, интеграцию с существующим оборудованием и, конечно, адаптацию под конкретные нужды клиента. Недооценивают часто стоимость разработки индивидуального программного обеспечения – это может быть существенной статьей расходов, особенно если требуется сложная логика работы робота, учет внешних факторов или взаимодействие с другими системами управления производством. Например, мы однажды столкнулись с задачей интеграции робота с системой управления складом заказчика. Предполагалось просто передавать данные о перемещении товара. На деле же выяснилось, что необходимо учитывать разные форматы данных, безопасность передачи и асинхронность работы систем. Простой 'пиing-pong' данных не годился.
Еще один момент, который часто игнорируют – это физическое пространство и совместимость. Размер робота, его грузоподъемность, радиус действия должны идеально соответствовать задачам и условиям работы. Иногда бывает, что рабочее пространство, которое казалось достаточным при первоначальном планировании, оказывается недостаточным для полного цикла операций. И тут уже приходится пересматривать всю систему, что, конечно, увеличивает стоимость и время реализации.
Разработка алгоритмов и контроль качества
В нашей практике разработка алгоритмов движения робота часто оказывается самым сложным этапом. Недостаточно просто запрограммировать робота на выполнение последовательности действий. Необходимо учитывать множество факторов – динамику объектов, необходимость избегать столкновений, точность позиционирования. Мы внедрили систему виртуального моделирования, позволяющую проверять алгоритмы до физической реализации. Это существенно сокращает время на отладку и снижает риски ошибок.
Причем здесь стоит упомянуть важность тестирования. Недостаточно протестировать систему в лабораторных условиях. Необходимо провести комплексное тестирование в реальных условиях эксплуатации, с учетом всех возможных факторов – шума, вибрации, температуры, влажности. Только так можно убедиться в надежности и безопасности работы системы роботов-манипуляторов.
Пример из практики: Сборка электроники
Недавно мы работали над проектом по автоматизации сборки печатных плат. Заказчик хотел автоматизировать процесс установки компонентов на плату. Первоначальная идея – использовать стандартного робота-манипулятора с визуальным контролем. Но мы быстро поняли, что это не будет эффективно. Слишком высокая скорость сборки, необходимость высокой точности и разнообразие компонентов требовали более сложного решения. В итоге мы разработали индивидуальный алгоритм, использующий машинное зрение для распознавания компонентов и платеи, а также систему управления траекторией робота, оптимизированную для максимальной скорости и точности. Это позволило заказчику значительно повысить производительность и снизить количество брака.
Типичные ошибки при выборе поставщика
При выборе поставщика автоматических систем управления важно не ориентироваться только на цену. Нужно учитывать опыт компании, квалификацию персонала, наличие гарантий и сервисного обслуживания. Многие клиенты ошибаются, выбирая компании, которые предлагают 'готовые решения'. На самом деле, даже самые 'готовые' решения требуют адаптации под конкретные нужды заказчика.
Важно, чтобы поставщик был готов к сотрудничеству на всех этапах проекта – от проектирования до сервисного обслуживания. И не боялся предлагать альтернативные решения, если предложенный вариант не оптимален.
Проблемы с интеграцией и обслуживанием
Часто возникают проблемы с интеграцией роботов-манипуляторов с существующим оборудованием. Это может быть связано с различиями в протоколах обмена данными, несовместимостью интерфейсов или необходимостью разработки специальных драйверов. Недостаточно просто подключить робота к сети. Необходимо убедиться, что он сможет корректно взаимодействовать со всеми другими системами.
И не стоит забывать о регулярном техническом обслуживании. Роботы-манипуляторы – это сложные машины, которые требуют регулярной диагностики и профилактики. Иначе они могут выйти из строя в самый неподходящий момент.
Будущее ОЕМ систем
Я думаю, что в будущем ОЕМ робот манипулятор системы будут становиться все более интеллектуальными и автономными. Будут распространяться системы, использующие искусственный интеллект и машинное обучение для самообучения и оптимизации работы. Будут появляться более гибкие и адаптируемые роботы, способные выполнять широкий спектр задач. А также автоматические дозирующие системы и паллетизирующие системы станут еще более распространенными.
Но несмотря на все инновации, основа успеха всегда будет – квалифицированные специалисты и тщательное планирование. Без этого любые технологии будут неэффективны.
ООО Компания Чжэнчжоу Юйхэн, с нашим опытом в разработке и производстве автоматических решений, стремится предоставлять клиентам наиболее оптимальные системы роботов-манипуляторов, учитывая все специфические потребности производства.
Соответствующая продукция
Соответствующая продукция




Самые продаваемые продукты
Самые продаваемые продукты-
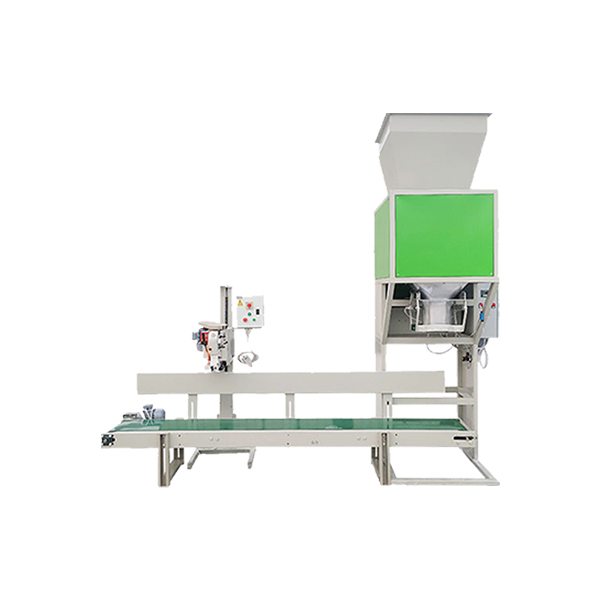
 Статическое дозирование YH-SPL
Статическое дозирование YH-SPL -
 Машина для упаковки гранул YH-ZD10
Машина для упаковки гранул YH-ZD10 -
 Динамическое пакетирование YH-DPL
Динамическое пакетирование YH-DPL -
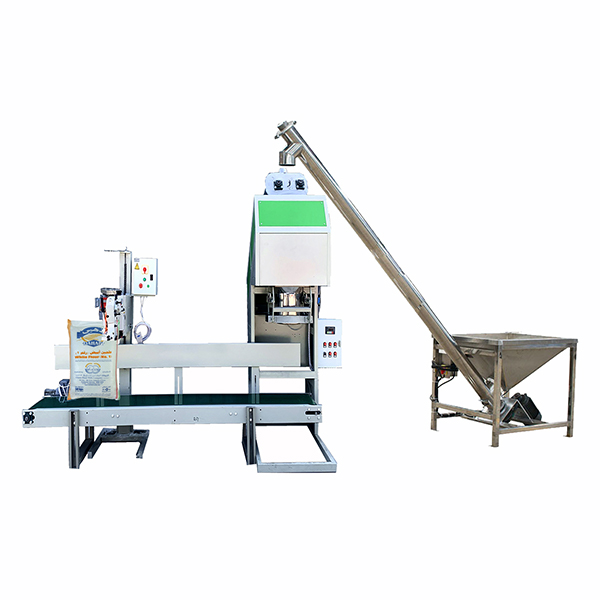 Машина для упаковки порошков YH-LX50
Машина для упаковки порошков YH-LX50 -
 Многофункциональная упаковочная машина YH-PD50
Многофункциональная упаковочная машина YH-PD50 -
 Высокоскоростная машина для упаковки гранул YH-A50K
Высокоскоростная машина для упаковки гранул YH-A50K -
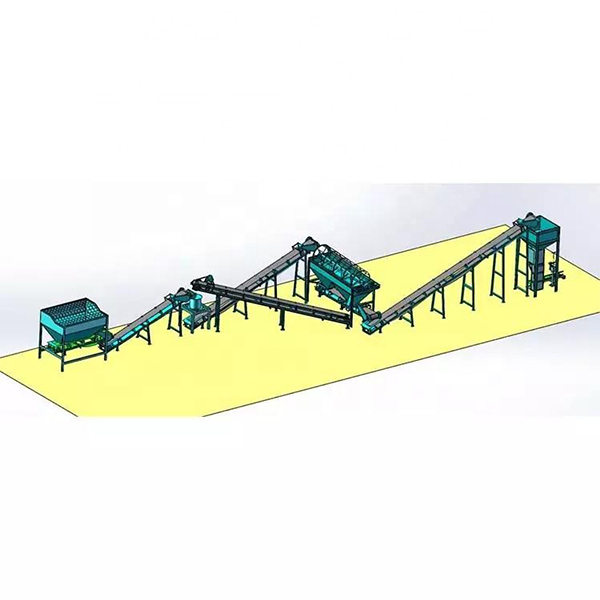
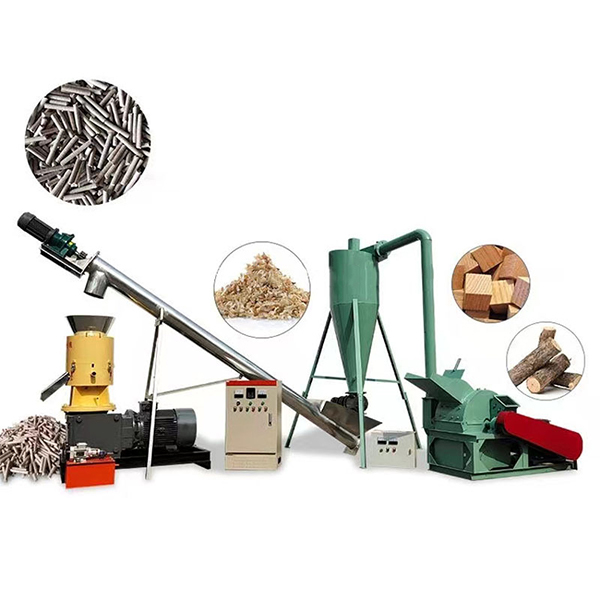 Простая линия по производству гранул из биомассы
Простая линия по производству гранул из биомассы -
 Линия по производству гранулированных органических удобрений
Линия по производству гранулированных органических удобрений -
 Линия упаковки и паллетирования
Линия упаковки и паллетирования -
 Полностью автоматическая упаковочная машина YH-AUTO
Полностью автоматическая упаковочная машина YH-AUTO -
 Порошковый фасовочный аппарат YH-1000P для биг-бэгов
Порошковый фасовочный аппарат YH-1000P для биг-бэгов -
 Машина для упаковки песка YH-PD50
Машина для упаковки песка YH-PD50
Связанный поиск
Связанный поиск- Производители фосфорных удобрений
- горизонтальная упаковочная машина флоу пак
- OEM упаковка
- Ведущие покупатели производственных линий
- Ведущее оборудование для упаковки продуктов питания
- Упаковочная машина для зерна в Китае
- Ведущая автоматическая машина для фасовки и упаковки
- Самонесущие заводы упаковочных машин
- производство фосфорно калийных удобрений
- Краны-штабелеры оптом